
Nul doute que vous connaissez l’existence des moteurs car il en existe toute une panoplie ! Le premier qui vous viendra certainement à l’esprit sera le moteur de voiture, ou peut-être celui présent dans une perceuse électrique. Voilà deux exemples d’objets dans lesquels on peut trouver un moteur. Bien entendu, ces deux moteurs sont de type différent, il serait en effet peu probable de faire avancer votre voiture avec un moteur de perceuse électrique… et puis l’utilisation d’une perceuse intégrant un moteur de voiture de plusieurs centaines de kilos serait fastidieuse
 . Voyons donc comment fonctionne le moteur électrique le plus répandu : le moteur à courant continu…
. Voyons donc comment fonctionne le moteur électrique le plus répandu : le moteur à courant continu…
Sommaire
Un moteur, ça fait quoi au juste ?
Commençons en douceur par l’explication de ce à quoi sert un moteur et son fonctionnement.
Ce chapitre n’est pas un des plus simples car il va faire apparaître des notions de mécanique qui sont indispensables pour comprendre le mouvement. Il prend en général plusieurs heures de cours pour être bien expliqué. Nous allons donc vous faire ici uniquement une introduction à la mécanique du moteur. Cependant, cette introduction présente des notions très importantes pour bien comprendre la suite, ne la négligez donc pas !
Prenons un moteur électrique des plus basiques qui soient :

Vous avez devant vos yeux un moteur électrique tel que l’on peut en trouver dans les engins de modélisme ou dans les voitures téléguidées. Mais sachez qu’il en existe de toute sorte, allant du miniature au gigantesque, adaptés à d’autres types d’applications. Nous nous contenterons ici des moteurs électriques "basiques".
Transformation de l’énergie électrique en énergie mécanique
Un moteur ça fait quoi ? Ça tourne ! On dit qu' un moteur est un composant de conversion d’énergie électrique en énergie mécanique . Les moteurs à courant continu (ce terme deviendra plus clair par la suite) transforment l’énergie électrique en énergie mécanique de rotation, pour être précis. Mais ils peuvent également servir de générateur d’électricité en convertissant une énergie mécanique de rotation en énergie électrique. C’est le cas par exemple de la dynamo sur votre vélo !
Ce dernier point n’est pas à négliger, car même si dans la plupart des applications votre moteur servira à générer un mouvement, il sera possible qu’il soit actionné "à l’envers" et génère alors du courant. Il faudra donc protéger votre circuit pour ne pas l’abîmer à cause de cette "injection" d’énergie non désirée. On va revenir dessus plus loin.

Principe de fonctionnement du moteur à courant continu
Du vocabulaire
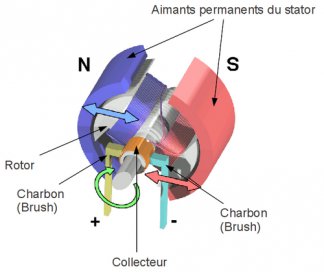
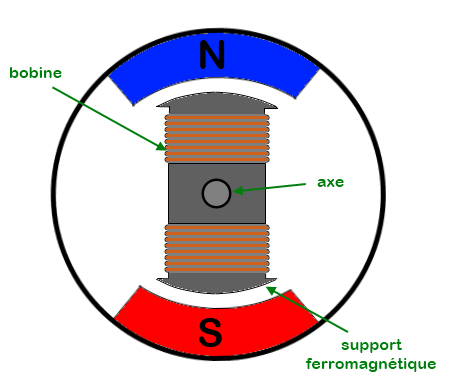
Tout d’abord, nous allons prendre une bonne habitude. Le moteur à courant continu s’appelle aussi "Machine à Courant Continu", que j’abrégerais en MCC. Le moteur à courant continu est composé de deux parties principales : le rotor (partie qui tourne) et le stator (partie qui ne tourne pas, statique). En électrotechnique (science traitant l’électricité en tant qu’énergie) le stator s’appelle aussi inducteur (qui fait l’action d’induire) et le rotor s’appelle l' induit (qui subit l’action d’induction). Sur l’image à droite, vous pouvez observer au milieu - entouré par les aimants bleu et rouge qui constituent le stator - le rotor composé de fils de cuivre enroulés sur un support lui même monté sur un axe. Cet axe, c’est l' arbre de sortie du moteur. C’est lui qui va transmettre le mouvement à l’ensemble mécanique (pignons, chaîne, actionneur…) qui lui est associé en aval. Dans le cas d’un robot sur roues par exemple, on va mettre la roue sur cet axe, bien souvent par l’intermédiaire d’un réducteur qui diminue la vitesse de rotation tout en augmentant le couple. On verra tout à l’heure pour éclaircir ces termes qui doivent, pour l’instant, ne pas vous dire grand chose.
De nouvelles bases sur l’électricité
Vous le savez peut-être, lorsque un courant circule dans un fil il génère un champ magnétique **. Plus le courant qui circulera dans le fil sera grand, plus l’intensité du champs magnétique sera élevée. Lorsqu’on enroule du fil électrique sur lui même, on forme une **bobine . Un des avantages de la bobine est que l’on "cumule" ce champ magnétique. Donc plus on a de tours de fil (des spires ) et plus le champ magnétique sera élevé pour un courant donné.
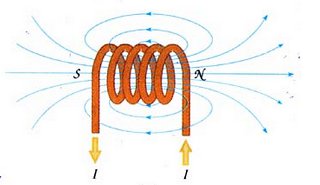
En somme, on retiendra que lorsque l’on crée une bobine de fil électrique, en général du cuivre, on additionne les champs magnétiques créés par chaque spire de la bobine. Ainsi, vous comprendrez aisément que plus la bobine contient de spires et plus le champ magnétique qu’elle induit est important. Je ne vous ai pas trop perdu, ça va pour le moment ?
 Bon, continuons.
Bon, continuons.
Le magnétisme
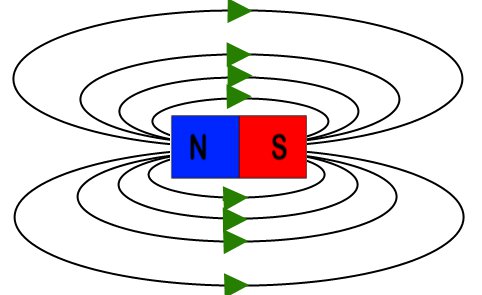
Oui, parlons-en. Ce sera bref, rassurez-vous. Je vais faire appel à votre expérience… avec les aimants. Vous avez tous déjà eu l’occasion d’avoir deux aimants dans la main et d’observer la résistance qu’ils émettent lorsque l’on veut les rapprocher l’un de l’autre, ou au contraire lorsqu’ils s’attirent soudainement dès qu’on les met un peu trop près. Ce phénomène est dû au champ magnétique que génèrent les aimants. Voilà un aimant permanent le plus simple soit-il :
Il possède un pôle N ord et un pôle S ud. Cet aimant génère un champ magnétique permanent , c’est à dire que le champ magnétique est toujours présent. C’est quelque chose de totalement invisible mais qui permet de faire des choses intéressantes.
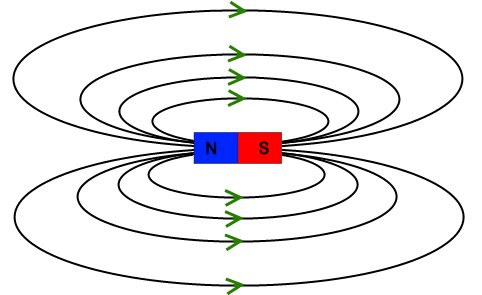
Notez bien que j’ai ajouté des flèches représentatives du sens de parcours du champ magnétique, c’est important pour la suite. Bon, pour terminer mon explication sur le champ magnétique, je vous propose d’imaginer qu’il s’agisse d’un flux invisible, un peu comme le courant. Pour se rapprocher de l’analogie avec l’eau, on peut imaginer aussi que l’aimant est une fontaine qui propulse de l’eau (champ magnétique) et qui la récupère à l’opposé de là où il l’a éjectée. Tout ça, pour en arriver à vous dire qu’approcher deux aimants avec le même pôle, ils se repoussent mutuellement (les deux fontaines éjectent de l’eau l’une contre l’autre, ce qui a pour effet de les repousser). Et on le comprend bien lorsque l’on regarde le sens du champ magnétique :
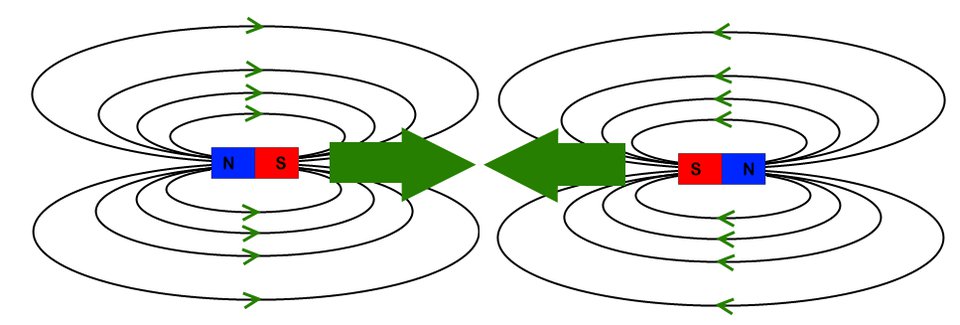
En revanche, deux aimants orientés dans le même sens se rapprocheront car leur champ magnétique ira dans le sens opposé. La première "fontaine" va aspirer ce que l’autre éjecte, et l’autre va aspirer ce que la première éjecte.
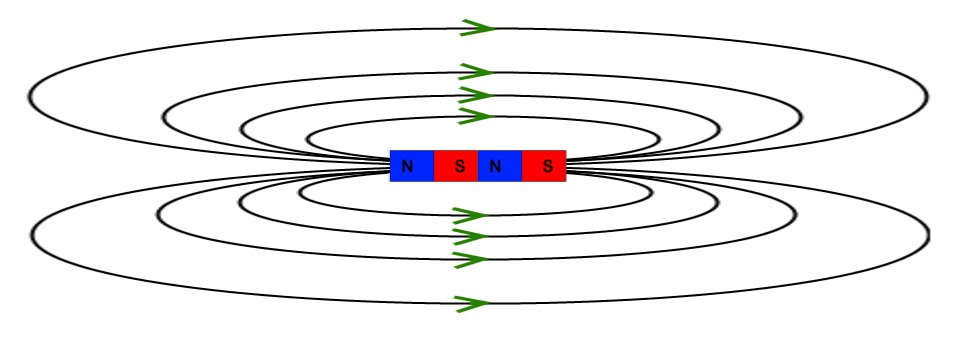
Par conséquent, le champ magnétique global sera plus intense. On peut alors schématiser le résultat sous la forme d’un seul aimant plus puissant.
Ça nous amène où tout ça ? Je comprends mieux comment fonctionne les aimants, mais pour un moteur électrique, c’est pareil ? :roll:
Eh oui, sans quoi mes explications n’auraient eu aucun sens si je vous avais dit qu’un moteur fonctionnait complètement différemment.
Décomposons notre explication en deux parties.
Le stator
Le stator, je l’ai dit au début, est une partie immobile du moteur. Sur l’image, il se trouve sur les côtés contre le châssis. Il forme un aimant avec ses pôles Nord et Sud. Cet ensemble aimant+châssis constitue donc le stator :
Il n’y a pas plus de choses à dire, l’essentiel du phénomène de rotation créé par un moteur électrique va se jouer dans le rotor.
Le rotor et la mise en mouvement
Le rotor, je le rappelle, est situé au centre du stator. Pour faire très simple, je vous donnerai les explications ensuite, le rotor est la pièce maîtresse qui va recevoir un courant continu et va induire un champ magnétique variable pour mettre en rotation l’arbre du rotor. Si l’on veut, oui, il s’auto-met en rotation. :roll:
Waaho ! Avec du courant continu il arrive à créer un champ magnétique variable ?

Surprenant n’est-ce pas ? Eh bien, pour comprendre ce qu’il se passe, je vous propose de regarder comment est constitué un rotor de MCC (j’abrège) :
Il s’agit bien d’un schéma de principe, normalement un moteur à courant continu est constitué de trois bobines sur son rotor. Autrement on pourrait obtenir un équilibre qui empêcherait la rotation de l’arbre du moteur, mais surtout le moteur tournerait dans un sens aléatoire. Ce qui n’est pas très adapté quand on veut faire avancer son robot.

Voilà donc le rotor de notre moteur. Bien, passons à la prati…
Eh oh, attends !! :shock: C’est quoi ces deux bobines, comment on les alimente ?
Ha, j’oubliais presque ! Merci de me l’avoir rappelé. Il y a en effet un élément dont nous n’avons pas encore évoqué l’existence, il s’agit du collecteur . Comme son nom le suggère, c’est un élément du moteur qui se situe sur l’arbre de rotation (ou l’axe du moteur si vous préférez) et qui a pour objectif de récupérer le courant afin de l’amener jusqu’aux bobines. On peut faire le schéma complet du moteur avec les bobines et le collecteur :
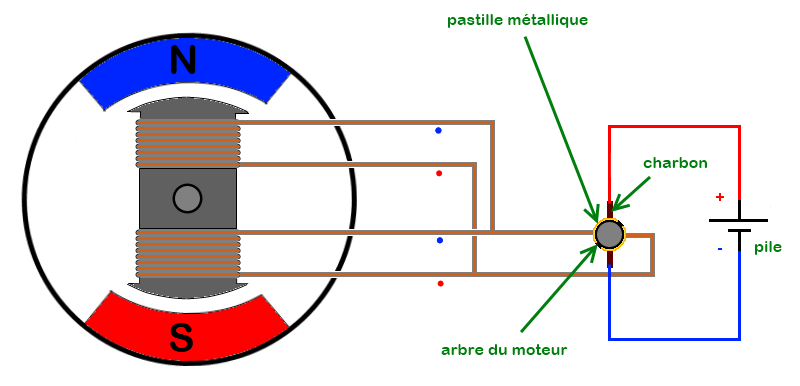
Dites-vous bien qu’il ne s’agit là que d’un schéma de principe simplifié, car je le disais, les moteurs n’ayant que deux bobines n’existent pas.
Le collecteur est représenté ici sur la partie droite de l’image. Il est situé sur l’arbre du moteur (son axe). Ce collecteur est constitué de deux pastilles métalliques auxquelles sont reliées les extrémités des bobines. Le contact électrique entre la pile qui alimente le moteur et les bobines se fait par le collecteur et par des éléments "spéciaux" que l’on appelle les charbons . Ces deux éléments servent à amener le courant dans les bobines en faisant un simple contact électrique de toucher. C’est à dire que les charbons frottent sur les pastilles métalliques lorsque le moteur tourne.
Et y tourne comment ce moteur, on le saura un jour ? :mad:
Ça vient, patience.
Prenons la configuration du moteur tel qu’il est sur l’image précédente. Faites bien attention au sens des bobines, car si elles sont bobinées dans un sens opposé ou bien si le courant circule dans un sens opposé, le moteur ne tournera pas. J’ai donc pris le soin de mettre un point bleu et rouge, pour indiquer le sens des bobines (vous allez comprendre). Nous y voilà.
Sur le schéma précédent, le pôle positif de la pile est relié, via le collecteur, à l’entrée bleue des deux bobines. Leur sortie, en rouge, est donc reliée, toujours via le collecteur, à la borne négative de la pile. Vous admettrez donc, avec ce que l’on a vu plus haut, qu’il y a un courant qui parcourt chaque bobine et que cela génère un champ magnétique. Ce champ est orienté selon le sens du courant qui circule dans la bobine. Dans un premier temps, on va se retrouver avec un champ magnétique tel que celui-ci :
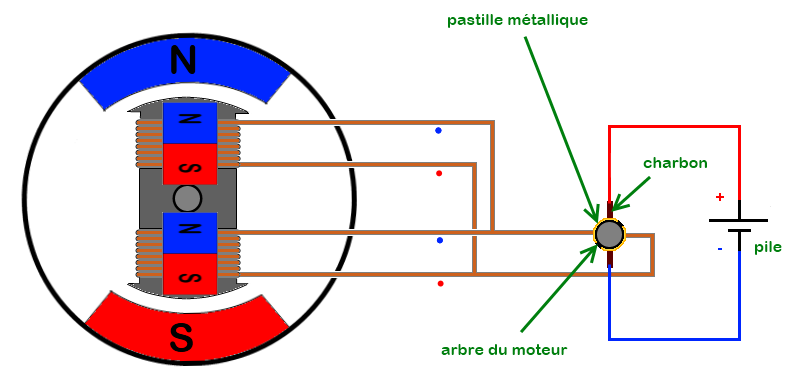
Ce champ va être opposé aux deux aimants permanents du stator du moteur, cela va donc mettre en mouvement l’axe du rotor. Et ce mouvement est défini par le fait que deux aimants orientés par leurs pôles opposés (face nord de l’un face au nord du deuxième, idem pour le sud) se repoussent. Par conséquent, l’axe du moteur, je le disais, va se mettre à tourner jusqu’à ce que les aimants permanents du stator se retrouvent face à chacun de leur complément créé par le champ magnétique des bobines :
ATTENDEEEEZ ! Ce n’est pas fini ! Non, car dans cette configuration, si rien ne se passe, eh bien… rien ne se passera.
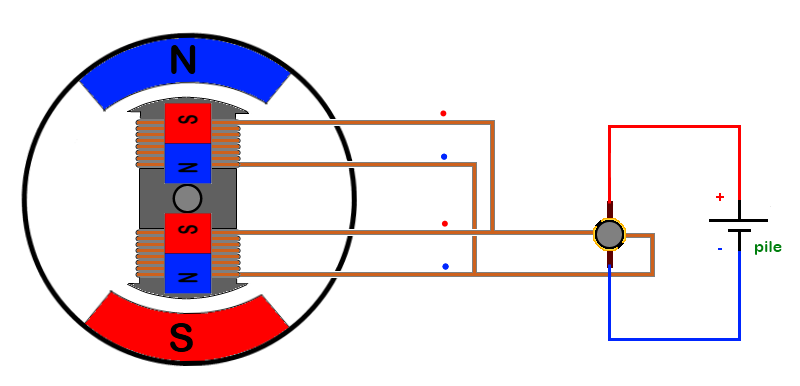
Et oui, puisque le moteur est arrivé dans une phase de stabilité. En effet, chaque aimant est face au champ magnétique opposé, donc ils s’attirent mutuellement ce qui a pour effet de régir cette situation d’équilibre. L’élément qui va s’opposer à cet équilibre est le branchement des bobines du rotor. Vous ne l’avez peut-être pas remarqué, mais les bobines ne sont plus connectées comme à la situation précédente. Le point rouge des bobines est maintenant relié au pôle positif de la pile et le point bleu au pôle négatif. Le champ magnétique généré par les bobines change alors d’orientation et l’on se retrouve avec des champs opposés. Le moteur est à nouveau en situation de déséquilibre (car les champs magnétiques se repoussent) et cela entraîne un mouvement de rotation de l’axe du moteur. Vous l’aurez compris, ces situations se répètent indéfiniment car
le moteur n’est jamais dans une configuration équilibrée
. C’est cette situation de déséquilibre qui fait que le moteur tourne.
Alors attention, je le répète une dernière fois, un moteur n’ayant que deux bobines comme sur mes schémas ne peut pas fonctionner, car c’est un modèle simplifié qui engendrerait immédiatement une situation équilibrée à la mise sous tension.
Pour vous prouver que ce que je dis est vrai, voilà des photos du rotor d’un moteur à courant continu que j’avais démonté il y a bien, bieen, bieeeeeen longtemps :
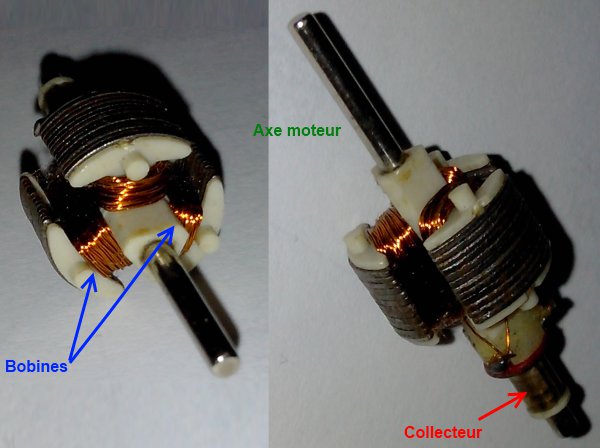
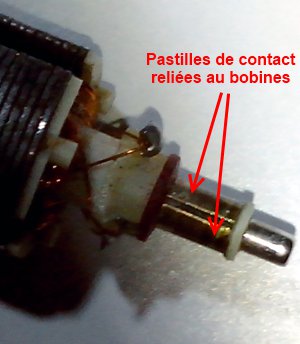
Vous voyez ? Trois bobines et trois pastilles reliées à chacune, sur le collecteur. Bon, je ne vous refais pas les explications, vous êtes capables de comprendre comment cela fonctionne.
La mécanique liée au moteur
A présent, nous allons détailler quelques notions de mécanique liées aux moteurs.
Le couple
Le couple est une notion un peu dure à comprendre, mais on va y arriver ! Partons de son unité. L’unité du couple est le Newton-Mètre (Nm), attention j’ai bien dit Newton-Mètre et non pas Newton
par
mètre ! Cette unité nous informe de deux choses : le couple est à la fois lié à une distance (le mètre) mais aussi à une force (le Newton). Maintenant je rajoute une information : le couple s’exprime par rapport à un axe. On peut en conclure que le couple est
la capacité du moteur à faire tourner quelque chose sur son axe
. Plus le couple est élevé et plus le moteur sera capable de mettre en mouvement quelque chose de lourd. Exemple : Vous avez peut-être déjà essayé de dévisser un écrou sur une roue de voiture. Vous avez probablement remarqué que plus vous avez une clef avec un bras long (un
effet de levier
important) et plus il était facile de faire bouger l’écrou (pour le premier tour, quand il est bien vissé/coincé). Ce phénomène s’explique simplement par le fait que vous avez plus de couple avec un levier long qu’avec un levier court. Et c’est logique ! Si l’on considère que le couple s’exprime en Newton-mètre, le Newton se sera la force de vos muscles (considérée fixe dans notre cas d’étude, sauf si vous vous appelez Hulk) et le mètre sera la longueur du levier. Plus votre levier est grand, plus la distance est élevée, et plus le couple augmente. Ce qui nous permet d’introduire la formule suivante :
Avec :
- : le couple, en Newton-mètre
- : la force exercée, en Newton
- : le rayon de l’action (la longueur du levier si vous préférez), en mètre
On pourra également se souvenir que plus la force exercée sur l’axe de rotation d’un moteur est grande, plus il faudra un couple élevé. Et plus le couple du moteur sera élevé, moins votre futur robot aura de difficultés à supporter de lourdes charges. Cela dit, tout n’est pas parfait car plus la charge est lourde, plus la consommation électrique du moteur va augmenter. On va voir la relation qui recoupe ces deux informations.
Dans le système international, l’expression du couple se fait en N.m (Newton mètre), mais le commun des mortels arrive mieux à interpréter des kilos plutôt que des Newtons, donc les constructeurs prennent des raccourcis. Pour passer des Newtons en kilos, il suffit simplement de les multiplier par la constante gravitationnelle 'g' (qui vaut environ 9.81). Soit . Il en équivaut alors la même formule introduisant les mètres : .
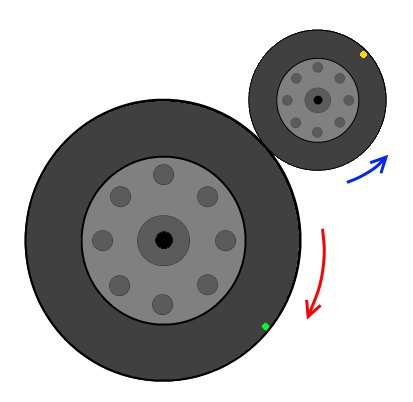
La vitesse de rotation
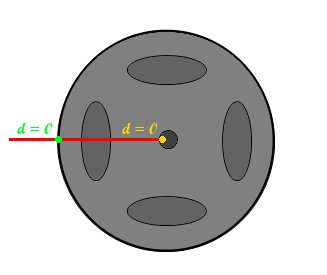
La vitesse de rotation est mesurée par rapport à l’axe de rotation du moteur. Imaginons que le moteur entraîne son axe, lorsqu’il est alimenté par un courant, ce dernier va avoir une vitesse de rotation. Il peut tourner lentement ou rapidement. On mesure une vitesse de rotation en mesurant l’angle en radians parcourus par cet axe pendant une seconde. C’est à dire que le moteur est en fonctionnement, que son axe tourne et que l’on mesure jusqu’où va l’axe de rotation, à partir d’un point de départ fixe, en une seconde. Regardez plutôt l’image suivante pour mieux visualiser ce que je veux vous dire (comprenez que le truc gris et rond c’est le moteur que j’ai dessiné. :roll: On le voit de face et le cercle au milieu c’est son axe) :
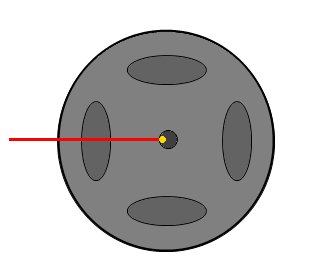
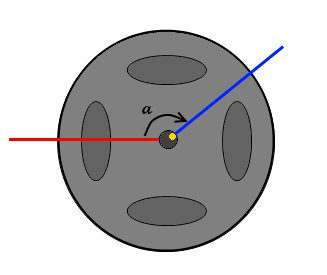
Marquage de l’axe du moteur par un point jaune (première image). Au bout d’une seconde (seconde image), mesure de l’angle entre la position de départ et d’arrivée du point jaune. On obtient alors la vitesse de rotation de l’axe du moteur. Cette mesure est exprimée en angle par seconde.
Savez-vous pourquoi l’on mesure ainsi la vitesse de rotation de l’axe du moteur ? Eh bien car cette mesure est indépendante du diamètre de cet axe. Et oui, car un point éloigné du centre de l’axe du moteur a une distance beaucoup plus grande à parcourir que son homologue proche du centre de l’axe. Du coup, pour aller parcourir une distance plus grande en un temps donné il est obligé d’aller plus vite :
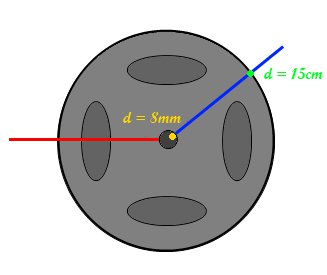
En prenant la mesure à partir d’un point de départ fixe, la distance parcourue par le point jaune et vert est nulle (première image). En faisant tourner l’axe du moteur pendant une seconde, on s’aperçoit que la distance parcourue par chaque point est différente (seconde image). La distance parcourue par le point vert est quasiment 20 fois plus grande que celle parcourue par le point jaune ! Et c’est pourquoi le point vert aura été plus rapide que le point jaune car la distance qu’il parcourt en un même temps est beaucoup plus grande.
En mécanique, comme on aime les choses marrantes on exprime la vitesse de rotation en radians par seconde et son symbole est le caractère grec , prononcez 'oméga’. Pour rappel, 360 est aux degrés ce que 2 pi est aux radians (autrement dit, une vitesse de 2pi/secondes équivaut à dire "l’axe fait un tour par seconde"). Cela se traduit par ° radian. Malheureusement, la vitesse de rotation angulaire n’est pas donnée avec les caractéristiques du moteur. En revanche, on trouve une vitesse en tour/minutes ( ). Vous allez voir que pour passer de cette unité aux rad/s, c’est assez facile. En effet, on sait qu’un tour correspond à une rotation de l’axe sur 360°. Soit 1tr = 360°. Et dans une minute il y a 60 secondes. Donc l’axe tourne de tour par seconde, s’il fait un tour par minute. On peut alors établir la relation suivante :
Hors, on sait que , ce qui donne une nouvelle relation :
On peut finalement donner la formule qui convertit un radian par seconde en tours par minutes :
Et je fais comment si je veux savoir à quelle vitesse ira mon robot ?
Eh bien comme je vous l’expliquais précédemment, pour répondre à cette question il faut connaitre le diamètre de la roue. Prenons l’exemple d’une roue ayant 5cm de diamètre (soit 0.05 mètres) et un moteur qui tourne à 20 rad/s. Le périmètre de la roue vaut donc 15.7 cm (0.157 m) d’après la formule du périmètre d’un cercle qui est , avec le rayon du cercle. Cela signifie qu’en faisant tourner la roue sur une surface plane et en lui faisant faire un tour sur elle-même, la roue aura parcouru 0,157m sur cette surface. On admet que le moteur tourne à 20 rad/s ce qui représente donc 3.18 tours de l’axe du moteur par seconde (d’après la dernière formule que je vous ai donnée). On peut donc calculer la distance parcourue en une seconde grâce à la formule :
Avec :
- : la vitesse en mètre par seconde (m/s)
- : la distance en mètre (m)
- : le temps en secondes (s)
On va donc adapter cette formule avec la distance qu’a parcouru la roue en faisant un tour sur elle-même ( ) et le nombre de tours par seconde de l’axe du moteur ( ) : On sait que et que Le robot parcourt donc une distance de 50 centimètres en une seconde (ce qui équivaut à 1800 mètres par heure). Vous avez maintenant toutes les cartes en main pour pouvoir faire avancer votre robot à la vitesse que vous voulez !
Les réducteurs
Un moteur électrique est bien souvent très rapide en rotation. Hors si vous avez besoin de faire un robot qui ne va pas trop vite, il va falloir faire en sorte de réduire sa vitesse de rotation. On peut très bien mettre un "frein" qui va empêcher le moteur de tourner vite, ou bien le piloter (on va voir ça toute à l’heure). Cela dit, même si on réduit sa vitesse de rotation, le moteur ne va pas pouvoir supporter des charges lourdes. Autrement dit, votre robot ne pourra même pas se supporter lui-même ! Nous avons donc besoin de couple. Et pour avoir du couple, tout en réduisant la vitesse de rotation, on va utiliser ce que l’on appelle un réducteur . Un réducteur est un ensemble composé d' engrenages qui permet de réduire la vitesse de rotation de l’axe du moteur tout en augmentant le couple de sortie. Sur l’image suivante, extraite du site de l' Académie d’Aix Marseille , on peut observer un ensemble moteur + réducteur + roue :
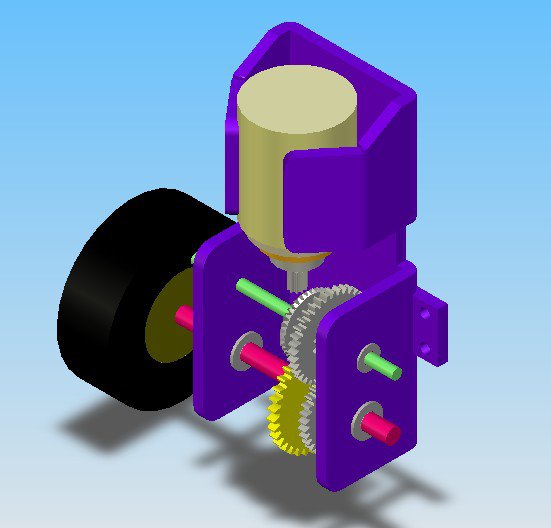
Source : http://www.technologie.ac-aix-marseille.fr/spip/spip.php?article35&id_document=51
La règle qui régit son fonctionnement indique qu’entre deux engrenages la puissance est conservée (aux pertes près qui sont dues au frottement des engrenages entre eux). Et comme la puissance mécanique est dépendante du couple et de la vitesse (partie suivante), on peut facilement passer de l’un à l’autre. Reprenons notre roue faisant 5cm de diamètre. Mettez en contact contre elle une grande roue de 10cm de diamètre (deux fois plus grande). Lorsque la petite roue fait un tour, elle va entrainer la deuxième roue plus grande qui va faire… un demi-tour. Oui car le périmètre de la grande roue est deux fois plus grand que celui de la petite. Lorsque la petite parcourt 0,157m en faisant un tour sur elle-même, la grande parcourt elle aussi cette distance mais en ne faisant qu’un demi-tour sur elle-même.
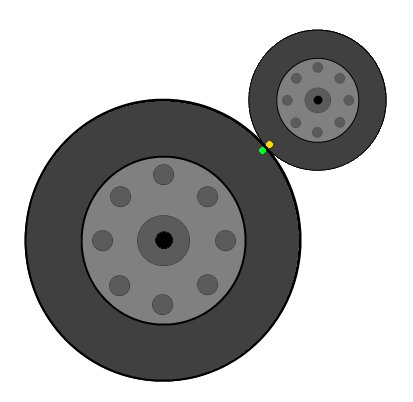
Deux roues en contact, la petite entraîne la grande dont le diamètre est deux fois plus grand que la petite (première image). Le point vert et jaune sert à repérer la rotation de chaque roue. Lorsque la petite roue fait un demi tour, la grande roue fait un quart de tour (seconde image). Si elle fait un tour complet, la grande roue ne fera qu’un demi-tour.
Ce que l’on ne voit pas sur mon dessin, c’est le couple. Hors, ce que vous ne savez peut-être pas, c’est que l’axe de la grande roue bénéficie en fait de deux fois plus de couple que celui de la petite. Car les réducteurs ont pour propriété, je le disais, de modifier le couple de sortie et la vitesse. Et ce selon la relation suivante qui donne le rapport de réduction :
Avec :
- : le rapport de réduction du réducteur
- : la vitesse de rotation de l’axe du moteur en entrée du réducteur
- : la vitesse de rotation de l’axe du moteur en sortie du réducteur
- : couple exercé par l’axe de sortie du réducteur
- : couple exercé par l’axe du moteur, en entrée du réducteur
Un réducteur s’apparente donc à un système qui modifie deux grandeurs qui sont liées : le couple et la vitesse. On peut schématiser le fonctionnement d’un réducteur de la manière suivante :
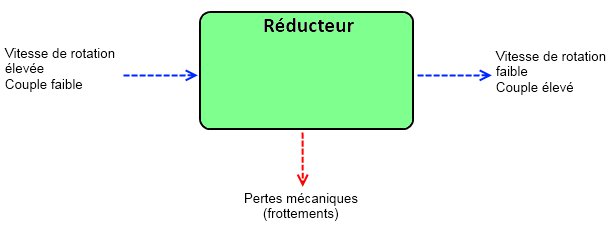
C’est quoi ça, les pertes mécaniques ? :roll:
Justement, venons-en à un autre point que je voudrais aborder.
La puissance et le rendement
Dans un moteur, on trouve deux puissances distinctes :
- La première est la puissance électrique . Elle représente la quantité d’énergie électrique dépensée pour faire tourner l’axe du moteur. Elle représente aussi la quantité d’énergie électrique induite lorsque le moteur tourne en générateur, c’est à dire que le moteur transforme une énergie mécanique de rotation en une énergie électrique. Elle se calcule simplement à partir de la formule suivante :
Puissance = Tension x Courant
Selon les conventions, la tension est exprimée en Volt et le courant en Ampère. Quant à la puissance, elle est exprimée en Watt ( W ).
- La seconde est la puissance mécanique . Elle correspond au couple du moteur multiplié par sa vitesse angulaire :
Le couple doit être exprimé en Newton-Mètre (Nm) et la vitesse en radians par seconde (rad/s). Pour la puissance mécanique, il s’agit encore de Watt.
Une puissance (mécanique ou électrique) s’exprime habituellement en Watts (symbole W ). On retrouve cependant d’autres unités telle que le Cheval Vapeur (CV), avec 1 CV qui vaut (arrondi) 735,5 W.
Mais comme dans tout système, la perfection n’existe pas, on va voir la différence qu’il y a entre la puissance mécanique et électrique, alors que à priori elles devraient être équivalentes. Lorsque le moteur est en fonctionnement, il génère des pertes . Ces pertes sont dues à différents phénomènes électriques ou thermiques (échauffement) ou tels que les frottements mécaniques (air, pièces en contact, magnétique). Il y a donc une différence entre la puissance (électrique) en entrée du moteur et la puissance (mécanique) en sa sortie. Cette différence s’exprime avec la notion de rendement . Le rendement est une caractéristique intrinsèque à chaque moteur et permet de définir l’écart entre la puissance d’entrée du moteur et sa puissance de sortie. Il s’exprime sans unité. Il permet également de savoir quel est le pourcentage de pertes provoquées par le moteur. Le rendement se note avec la lettre grecque eta ( ) et se calcule grâce à la formule suivante :
Dans le cas du moteur, on aurait alors les puissances électrique et mécanique telles quelles :
Et dans le cas où le moteur est utilisé en générateur électrique (on fait tourner l’axe à la main par exemple), la formule reste la même mais la place des puissances électrique et mécanique est inversée :
Attention, le rendement est une valeur sans unité , on peut en revanche l’exprimer sous forme de pourcentage.
Si l’on prend un exemple : un moteur de puissance électrique 100W, ayant une puissance mécanique de 84W aura un rendement de :
Ce qui correspond à 84%. Sachez toutefois que le rendement ne pourra dépasser les 100% (ou 1), car
il n’existe pas de systèmes capables de fournir plus d’énergie qu’ils n’en reçoivent
. Cela dit, si un jour vous parvenez à en trouver un, vous pourrez devenir le Roi du Monde !!

Les moteurs électriques ont habituellement un bon rendement, entre 80% (0.8) et 95% (0.95). Cela signifie que pour 100W électriques injectés en entrée, on obtiendra en sortie 80 à 95W de puissance mécanique. Tandis qu’un moteur à explosion de voiture dépasse à peine les 30% de rendement !
Quelques relations
Une toute dernière chose avant de commencer la suite, il y a deux relations à connaitre vis-à-vis des moteurs.
Lien entre vitesse et tension
Dans un moteur CC, quelque soit sa taille et sa puissance, il faut savoir que la tension à ses bornes et la vitesse de sortie sont liées. Plus la tension sera élevée et plus la vitesse sera grande. Nous verrons cet aspect dans la prochaine partie. Faites attention à bien rester dans les plages de tension d’alimentation de votre moteur et ne pas les dépasser. Il pourrait griller ! En effet, vous pouvez dépasser de manière temporaire la tension maximale autorisée pour donner un coup de fouet à votre moteur, mais ne restez jamais dans une plage trop élevée ! Une deuxième conséquence de cette relation concerne le moment du démarrage du moteur. En effet, la relation entre tension et vitesse n’est pas tout à fait linéaire pour les tensions faibles, elle est plutôt "écrasée" à cet endroit. Du coup, cela signifie que le moteur n’arrivera pas à tourner pour une tension trop basse. C’est un peu comme si vous aviez une tension de seuil de démarrage. En dessous de cette tension, le moteur est à l’arrêt, et au dessus il tourne correctement avec une relation de type "100 trs/min/volts" (autrement dit, le moteur tournera à 100 tours par minutes pour 1 volt, puis 200 tours par minutes pour 2 volts et etc etc… bien entendu le 100 est pris comme un exemple purement arbitraire, chaque moteur a sa caractéristique propre).
Lien entre courant et couple
Comme nous venons de le voir, la vitesse est une sorte d’image de la tension. Passons maintenant à une petite observation : Lorsque l’on freine l’axe du moteur, par exemple avec le doigt, on sent que le moteur insiste et essaye de repousser cette force exercée sur son axe. Cela est du au courant qui le traverse et qui augmente car le moteur, pour continuer de tourner à la même vitesse, doit fournir plus de couple. Hors, le couple et le courant sont liés : si l’un des deux augmente alors l’autre également. Autrement dit, pour avoir plus de couple le moteur consomme plus de courant. Si votre alimentation est en mesure de le fournir, il pourra éventuellement bouger, sinon, comme il ne peut pas consommer plus que ce qu’on lui donne, il restera bloqué et consommera le maximum de courant fourni.
Si vous faites circuler trop de courant dans un moteur pour trop longtemps, il va chauffer. Les moteurs sont des composants sans protection. Même s’ils chauffent ils ne feront rien pour s’arrêter, bien au contraire. Cela peut mener à une surchauffe et une destruction du moteur (les bobines à l’intérieur sont détruites). Attention donc à ne pas trop le faire forcer sur de longues périodes continues.
Alimenter un moteur
Bon, et si nous voyions un peu comment cela se passe dans la pratique ? Je vais vous montrer comment alimenter les moteurs électriques à courant continu. Vous allez voir que ce n’est pas aussi simple que ça en a l’air, du moins lorsque l’on veut faire quelque chose de propre. Vous allez comprendre de quoi je parle…
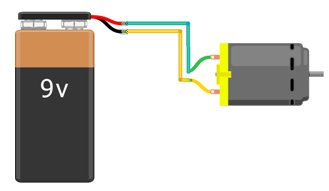
Connecter un moteur sur une source d’énergie : la pile
Faisons l’expérience la plus simple qui soit : celle de connecter un moteur aux bornes d’une pile de 9V :
C’est tout ?
Ben oui, quoi de plus ? Le moteur est connecté, son axe tourne, la pile débite du courant… Ha ! Voilà ce qui nous intéresse dans l’immédiat : la pile débite du courant. Oui et pas des moindres car les moteurs électriques sont bien généralement de véritables gloutons énergétiques. Si vous avez la chance de posséder un ampèremètre, vous pouvez mesurer le courant de consommation de votre moteur. En général, pour un petit moteur de lecteur CD on avoisine la centaine de milliampères. Pour un moteur un peu plus gros, tel qu’un moteur de modélisme, on trouve plusieurs centaines de milliampères de consommation. Pour des moteurs encore plus gros, on peut se retrouver avec des valeurs dépassant largement l’ampère voire la dizaine d’ampères. Revenons à notre moteur. Lui ne consomme pas plus de 100mA à vide. Mais pour une simple pile c’est beaucoup. Et je vous garantis qu’elle ne tiendra pas longtemps comme ça ! De plus, la vitesse n’est pas réglable, le moteur tourne toujours à son maximum (si c’est un moteur fait pour tourner à 9V). Enfin, pour allumer ou arrêter le moteur, vous êtes obligé de le connecter ou le déconnecter de la pile. En somme, utiliser un moteur dans cette configuration, par exemple pour faire avancer votre petit robot mobile, n’est pas la solution la plus adaptée.
Avec la carte Arduino
Vous vous doutez bien que l’on va utiliser la carte Arduino pour faire ce que je viens d’énoncer, à savoir commander le moteur à l’allumage et à l’extinction et faire varier sa vitesse.
Ne faites surtout pas le montage qui suit, je vous expliquerai pourquoi !
Admettons que l’on essaie de brancher le moteur sur une sortie de l’Arduino :
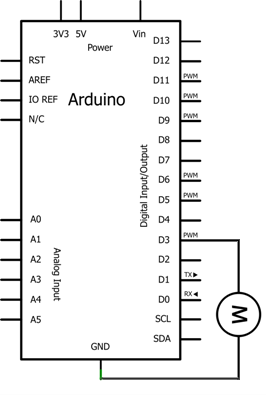
Avec le programme adéquat, le moteur va tourner à la vitesse que l’on souhaite, si l’on veut, réglable par potentiomètre et s’arrêter ou démarrer quand on le lui demande. C’est mieux. C’est la carte Arduino qui pilote le moteur. Malheureux ! Vous ne croyez tout de même pas que l’on va se contenter de faire ça ?! Non, oulaaaa. C’est hyper ultra dangereux… pour votre carte Arduino ! Il est en effet impensable de réaliser ce montage car les moteurs à courant continu sont de véritables sources de parasites qui pourraient endommager, au point de vue matériel, votre carte Arduino ! Oubliez donc tout de suite cette idée de connecter directement le moteur sur une sortie de votre Arduino. Les moteurs, quand ils tournent, génèrent tout un tas de parasites qui peuvent être des surtensions très grandes par rapport à leur tension d’alimentation. De plus, le courant qu’ils demandent est bien trop grand par rapport à ce que peut fournir une sortie numérique d’une carte Arduino (environ 40 mA). Ce sont deux bonnes raisons de ne pas faire le montage précédent.
Mais alors, on fait comment si on peut pas piloter un moteur avec notre carte Arduino ?
Je n’ai pas dis que l’on ne pouvait pas piloter un moteur avec une carte Arduino. J’ai bien précisé dans cette configuration . Autrement dit, il faut faire quelque chose de plus pour pouvoir mener à terme cet objectif.
Une question de puissance : le transistor
Souvenez-vous, nous avons parlé d’un composant qui pourrait convenir dans
ce chapitre
. Il s’agit du
transistor
. Si vous vous souvenez de ce que je vous avais expliqué, vous devriez comprendre pourquoi je vous en parle ici. Car, à priori, on ne veut pas allumer un afficheur 7 segments.
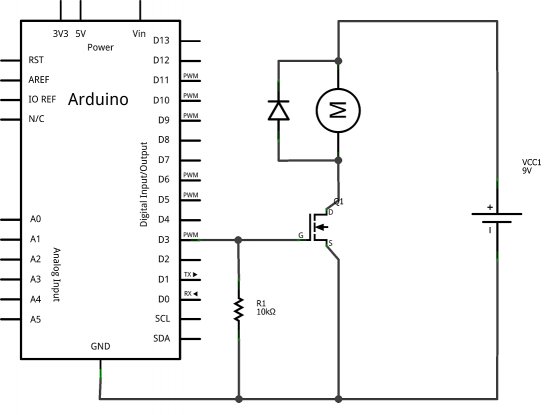
En fait, le transistor (bipolaire) est comme un interrupteur que l’on commande par un courant. Tout comme on avait fait avec les afficheurs 7 segments, on peut allumer, saturer ou bloquer un transistor pour qu’il laisse passer le courant ou non. Nous avions alors commandé chaque transistor pour allumer ou éteindre les afficheurs correspondants. Essayons de faire de même avec notre moteur :
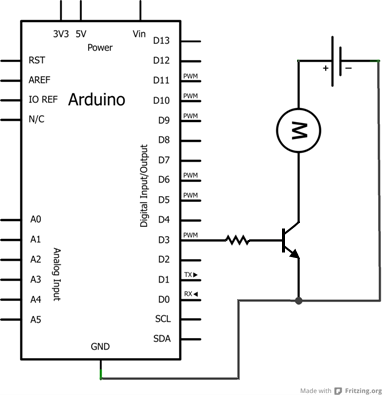
Ici, le transistor est commandé par une sortie de la carte Arduino via la résistance sur la base. Lorsque l’état de la sortie est au niveau 0, le transistor est bloqué et le courant ne le traverse pas . Le moteur ne tourne pas. Lorsque la sortie vaut 1, le transistor est commandé et devient saturé, c’est-à-dire qu’il laisse passer le courant et le moteur se met à tourner. Le problème, c’est que tout n’est pas parfait et ce transistor cumule des inconvénients qu’il est bon de citer pour éviter d’avoir de mauvaises surprises :
- parcouru par un grand courant, il chauffe et peut être amené à griller s’il n’est pas refroidi
- il est en plus sensible aux parasites et risque d’être endommagé
- enfin, il n’aime pas les "hautes" tensions
Pour répondre à ces trois contraintes, trois solutions. La première consisterait à mettre un transistor qui accepte un courant assez élevé par rapport à la consommation réelle du moteur, ou bien d’adjoindre un dissipateur sur le transistor pour qu’il refroidisse. La deuxième solution concernant les parasites serait de mettre un condensateur de filtrage. On en a déjà parlé avec les boutons poussoirs . Pour le dernier problème, on va voir que l’on a besoin d’une diode.
Le "bon" transistor
Comme je viens de vous l’expliquer, il nous faut un transistor comme "interface" de puissance. C’est lui qui nous sert d’interrupteur pour laisser passer ou non le courant. Pour l’instant, nous avons beaucoup parlé des transistors "bipolaires". Ils sont sympas, pas chers, mais il y a un problème : ils ne sont pas vraiment faits pour faire de la commutation, mais plutôt pour faire de l’amplification de courant. Le courant qu’il laisse passer est proportionnel au courant traversant sa base. Pour les petits montages comme celui des 7 segments ce n’est pas vraiment un problème, car les courants sont faibles. Mais pour des montages avec un moteur, où les courants sont bien plus élevés, votre transistor bipolaire va commencer à consommer. On retrouvera jusqu’à plusieurs volts de perdus entre son émetteur et son collecteur, autant de volts qui ne profiteront pas à notre moteur.
Mais alors on fait comment pour pas perdre tout ça ?
Eh bien c’est facile ! On change de transistor ! L’électronique de puissance a donné naissance à d’autres transistors, bien plus optimaux pour les questions de fonctionnement à fort courant et en régime saturé/bloqué. Ce sont les transistors MOSFET (appelés aussi "transistor à effet de champ"). Leur symbole est le suivant :
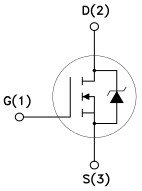
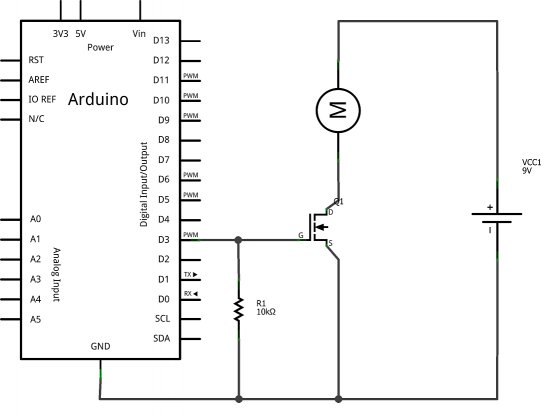
Il ressemble évidemment à un bipolaire, cela reste un transistor. Par contre il est fait pour faire de l’amplification de tension. Autrement dit, sa broche de commande (que l’on appelle "Gate") doit recevoir une commande, une tension, donc plus besoin de résistance entre Arduino et le transistor. Son fonctionnement est simple : une différence de potentiel sur la gate et il commute (laisse passer le courant entre D (Drain) et S (Source)) sinon il bloque le courant. Facile non ? Un inconvénient cependant : ils coûtent plus chers que leurs homologues bipolaires (de un à plusieurs euros selon le modèle, le courant qu’il peut laisser passer et la tension qu’il peut bloquer). Mais en contrepartie, ils n’auront qu’une faible chute de tension lorsqu’ils laissent passer le courant pour le moteur, et ça ce n’est pas négligeable. Il existe deux types de MOSFET, le canal N et le canal P . Ils font la même chose, mais le comportement est inversé (quand un est passant l’autre est bloquant et vice versa). Voici un schéma d’exemple de branchement (avec une résistance de pull-down, comme ça si le signal n’est pas défini sur la broche Arduino, le transistor sera par défaut bloqué et donc le moteur ne tournera pas) :
Protégeons l’ensemble : la diode de roue libre
Une diode, qu’est-ce que c’est ? Nous en avons déjà parlé à vrai dire, il s’agissait des diodes électroluminescentes (LED) mais le principe de fonctionnement reste le même sans la lumière. Une diode, dont voici le symbole :
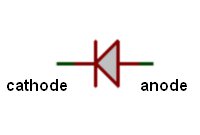
…est un composant électronique qui ne laisse passer le courant que dans un sens (cf. ce chapitre ). Vos souvenirs sont-ils à nouveau en place ? Alors, on continue ! Reprenons le schéma précédent avec le transistor piloté par l’Arduino et qui commande à son tour le moteur. Saturons le transistor en lui appliquant une tension sur sa base. Le moteur commence à tourner puis parvient à sa vitesse de rotation maximale. Il tourne, il tourne et là… je décide de couper l’alimentation du moteur en bloquant le transistor. Soit. Que va-t-il se passer ?
Le moteur va continuer de tourner à cause de son inertie !
Très bien. Et que cela va t-il engendrer ? Une tension aux bornes du moteur. En effet, je l’ai dit plus tôt, un moteur est aussi un générateur électrique car il est capable de convertir de l’énergie mécanique en énergie électrique même si son rôle principal est de faire l’inverse. Et cette tension est très dangereuse pour le transistor, d’autant plus qu’elle est très haute et peut atteindre plusieurs centaines de Volts (phénomène physique lié aux bobines internes du moteur qui vont se charger). En fait, le moteur va générer une tension à ses bornes et un courant, mais comme le transistor bloque la route au courant, cette tension ne peut pas rester la même et est obligée d’augmenter pour conserver la relation de la loi d’Ohm. Le moteur arrive à un phénomène de
charge
. Il va, précisément, se charger en tension. Je ne m’étends pas plus sur le sujet, il y a bien d’autres informations plus complètes que vous pourrez trouver sur internet. La question : comment faire pour que le moteur se décharge et n’atteigne pas des tensions de plusieurs centaines de Volts à ses bornes (ce qui forcerait alors le passage au travers du transistor et détruirait ce dernier) ? La réponse : par l’utilisation d’une diode. Vous vous en doutiez, n’est-ce pas ?
Il est assez simple de comprendre comment on va utiliser cette diode, je vous donne le schéma. Les explications le suivent :
Reprenons au moment où le moteur tourne. Plus de courant ne circule dans le transistor et la seule raison pour laquelle le moteur continue de tourner est qu’il possède une inertie mécanique. Il génère donc cette fameuse tension qui est orientée vers l’entrée du transistor. Comme le transistor est bloqué, le courant en sortie du moteur va donc aller traverser la diode pour revenir dans le moteur. C’est bien, car la tension induite (celle qui est générée par le moteur) restera proche de la tension d’alimentation du moteur et n’ira pas virevolter au voisinage des centaines de Volts. Mais ça ne s’arrête pas là. Pour ceux qui l’auraient remarqué, la tension induite par le moteur est opposée à celle que fournit l’alimentation de ce dernier. Or, étant donné que maintenant on fait un bouclage de la tension induite sur son entrée (vous me suivez toujours ?), eh bien cela alimente le moteur. Les deux tensions s’opposent et cela a pour effet de ralentir le moteur. La diode de roue libre , c’est comme ça qu’on l’appelle, sert donc à deux choses : d’une part elle protège le transistor de la surtension induite par le moteur, d’autre part elle permet au moteur de "s’auto-freiner".
Et on met quoi comme diode ?
Excellente question, j’allais presque oublier ! La diode que nous mettrons sera une diode Schottky . Ne vous laissez pas impressionner par ce nom barbare qui signifie simplement que la diode est capable de basculer (passer de l’état bloquant à passant) de manière très rapide. Dès lors qu’il y a une surtension engendrée par le moteur lorsque l’on le coupe de l’alimentation, la diode va l’absorber aussitôt avant que le transistor ait le temps d’avoir des dommages. On pourra également rajouter aux bornes de la diode un condensateur de déparasitage pour protéger le transistor et la diode contre les parasites. Au final, le schéma ressemble à ça :
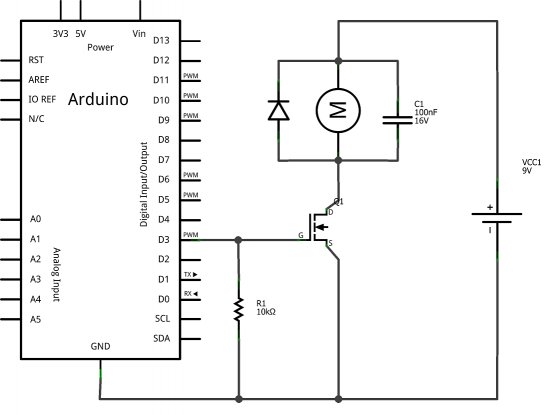
Sa valeur devra être comprise entre 1nF et 100nF environ. Le but étant de supprimer les petits parasites (pics de tension).
Petite illustration interactive :
Bon, nous allons pouvoir attaquer les choses sérieuses !
Piloter un moteur
Les montages de cette partie sont importants à connaître. Vous n’êtes pas obligé de les mettre en œuvre, mais si vous le voulez (et en avez les moyens), vous le pouvez. Je dis ça car la partie suivante vous montrera l’existence de shields dédiés aux moteurs à courant continu, vous évitant ainsi quelques maux de têtes pour la réalisation des schémas de cette page.
Faire varier la vitesse : la PWM
Maintenant que nous avons les bases fondamentales pour faire tourner notre moteur sans tout faire griller ( :roll: ), nous allons pouvoir acquérir d’autres connaissances. À commencer par quelque chose de facile : le réglage de la vitesse de rotation du moteur. Comme nous l’expliquions dans le premier morceau de ce chapitre, un moteur à courant continu possède une relation directe entre sa tension d’alimentation et sa vitesse de rotation. En effet, plus la tension à ses bornes est élevée et plus son axe tournera rapidement (dans la limite de ses caractéristiques évidemment). Cependant le microcontrôleur d’Arduino n’est capable de produire que des tensions de 0 ou 5V. En revanche, il peut "simuler" des tensions variables comprises entre 0 et 5V. Encore un petit rappel de cours nécessaire sur la PWM que nous avons déjà rencontrée ici pour vous rafraichir la mémoire. Nous sommes en mesure de produire à l’aide de notre microcontrôleur un signal carré dont le rapport cyclique est variable. Et grâce à cela, nous obtenons une tension moyenne (comprise entre 0 et 5V) en sortie de la carte Arduino. Il faut juste bien penser à utiliser les sorties adéquates, à savoir : 3, 5, 6, 9, 10 ou 11 (sur une duemilanove/UNO). Je résume : en utilisant la PWM, on va générer une tension par impulsions plus ou moins grandes. Ce signal va commander le transistor qui va à son tour commander le moteur. Le moteur va donc être alimenté par intermittences à cause des impulsions de la PWM. Ce qui aura pour effet de modifier la vitesse de rotation du moteur.
Mais, si le moteur est coupé par intermittences, il va être en rotation, puis va s’arrêter, puis va recommencer, etc. Ce sera pas beau et ça ne tournera pas moins vite. Je comprends pas trop ton histoire.
Non, puisque le moteur garde une inertie de rotation et comme la PWM est un signal qui va trop vite pour que le moteur ait le temps de s’arrêter puis de redémarrer, on va ne voir qu’un moteur qui tourne à une vitesse réduite.
Finalement, nous allons donc pouvoir modifier la vitesse de rotation de notre moteur en modifiant le rapport cyclique de la PWM. Plus il est faible (un état BAS plus long qu’un état HAUT), plus le moteur ira doucement. Inversement, plus le rapport cyclique sera élevé (état HAUT plus long que l’état BAS), plus le moteur ira vite. Tout cela couplé à un transistor pour faire passer de la puissance (et utiliser la tension d’utilisation adaptée au moteur) et nous pouvons faire tourner le moteur à la vitesse que nous voulons.
Génial non ? Pour l’instant je ne vous ferai pas de démo (vous pouvez facilement imaginer le résultat), mais cela arrivera très prochainement lors de l’utilisation de l’Arduino dans la prochaine sous-partie. Le montage va être le même que tout à l’heure avec le "nouveau" transistor et sa résistance de base :
Maintenant que le moteur tourne à une vitesse réglable, il pourra être intéressant de le faire tourner aussi dans l’autre sens (si jamais on veut faire une marche arrière, par exemple, sur votre robot), voire même d’être capable de freiner le moteur. C’est ce que nous allons tout de suite étudier dans le morceau suivant en parlant d’un composant très fréquent dans le monde de la robotique : le pont en H .
Tourner dans les deux sens : le pont en H
Faire tourner un moteur c’est bien. Tourner à la bonne vitesse c’est mieux. Aller dans les deux sens c’est l’idéal. C’est donc ce que nous allons maintenant chercher à faire !
Découverte du pont en H
Tout d’abord une question très simple : pourquoi le moteur tourne dans un seul sens ? Réponse évidente : parce que le courant ne va que dans un seul sens ! Pour pouvoir aller vers l’avant ET vers l’arrière il nous faut donc un dispositif qui serait capable de faire passer le courant dans le moteur dans un sens ou dans l’autre.
Vous pouvez faire l’expérience en reprenant le premier montage de ce chapitre où il n’y avait que le moteur connecté sur une pile de 9V. Essayez d’inverser les deux bornes du moteur (ça ne risque rien
) pour observer ce qu’il se passe : le moteur change de sens de rotation. C’est dû au champ magnétique créé par les bobines internes du moteur qui est alors opposé.
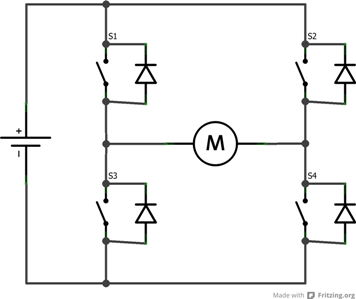
Reprenons notre dispositif de base avec un transistor (que nous symboliserons ici par un interrupteur). Si ce dernier est activé le moteur tourne, sinon le moteur est arrêté. Jusque là rien de nouveau. Rajoutons un deuxième transistor "de l’autre côté" du moteur. Rien ne va changer, mais il va falloir commander les deux transistors pour faire tourner le moteur. Ce n’est pas bon. Essayons avec quatre transistors, soyons fou !
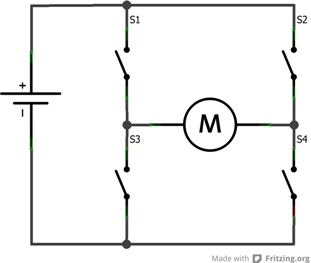
Eh bien, cela change tout ! Car à présent nous allons piloter le moteur dans les deux sens de rotation. Pour comprendre le fonctionnement de ce pont en H (appelé ainsi par sa forme), imaginons que je ferme les transistors 1 et 4 en laissant ouverts le 2 et le 3. Le courant passe de la gauche vers la droite.
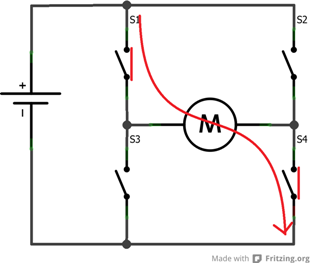
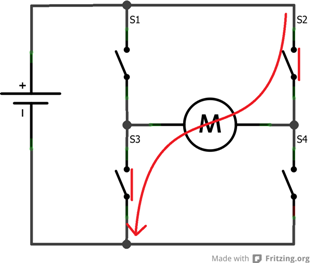
Si en revanche je fais le contraire (2 et 3 fermés et 1 et 4 ouverts), le courant ira dans l’autre sens ! C’est génial non ?
Et ce n’est pas tout !
Allons plus loin avec le pont en H
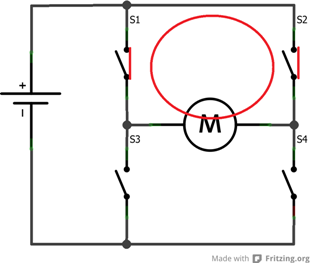
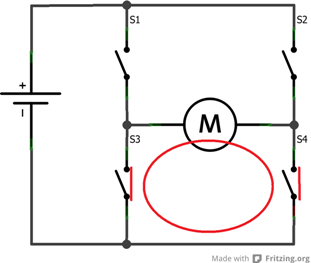
Comme vous l’aurez sûrement remarqué, les transistors fonctionnent deux par deux. En effet, si on en ferme juste un seul et laisse ouvert les trois autres le courant n’a nulle part où aller et rien ne se passe, le moteur est en roue libre. Maintenant, que se passe-t-il lorsqu’on décide de fermer 1 & 2 en laissant 3 et 4 ouverts ? Cette action va créer ce que l’on appelle un frein magnétique . Je vous ai expliqué plus tôt comment cela fonctionnait lorsque l’on mettait une diode de roue libre aux bornes du moteur. Le moteur se retrouve alors court-circuité. En tournant à cause de son inertie, le courant généré va revenir dans le moteur et va le freiner. Attention cependant, c’est différent d’un phénomène de roue libre où le moteur est libre de tourner.
Ne fermez jamais 1 & 3 et/ou 2 & 4 ensembles, cela ferait un court-circuit de l’alimentation et vos transistors risqueraient de griller immédiatement si l’alimentation est capable de fournir un courant plus fort que ce qu’ils ne peuvent admettre.
Les protections nécessaires
Les diodes de roue libre
Comme nous l’avons vu plus haut, pour protéger un transistor des parasites ou lors du freinage électronique du moteur, nous plaçons une diode. Dans le cas présent, cette diode devra être en parallèle aux bornes du transistor (regardez le schéma qui suit). Ici nous avons quatre transistors, nous utiliserons donc quatre diodes que nous placerons sur chaque transistor. Ainsi, le courant trouvera toujours un moyen de passer sans risquer de forcer le passage dans les transistors en les grillant. Comme vu précédemment, des diodes de type Shottky sont recommandées pour leurs caractéristiques de tension de seuil faible et commutation rapide.
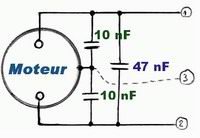
Un peu de découplage
Lorsque nous utilisons le moteur avec une PWM, nous générons une fréquence parasite. De plus, le moteur qui tourne génère lui même des parasites. Pour ces deux raisons, il est souvent utile d’ajouter des condensateurs de filtrage aux bornes du moteur. Comme sur le montage suivant, on peut en placer un en parallèle des deux broches du moteur, et deux autres plus petits entre une broche et la carcasse du moteur.

Ensuite, lorsque le moteur démarre il fera un appel de courant. Pour éviter d’avoir à faire transiter ce courant depuis la source de tension principale (une batterie par exemple), il est de bon usage de mettre un gros condensateur polarisé aux bornes de l’alimentation de puissance du pont en H. Ainsi, au moment du départ l’énergie sera en partie fournie par ce condensateur plutôt qu’en totalité par la batterie (ce qui évitera un échauffement abusif des conducteurs mais aussi une éventuelle baisse de la tension due à l’appel de courant).
Des solutions intégrées : L293, L298…
Afin d’éviter de vous torturer avec les branchements des transistors et leur logique de contrôle, des composants "clés en main" ont été développés et produits. Nous allons maintenant étudier deux d’entre eux que nous retrouvons dans quasiment tous les shields moteurs Arduino : le L293(D) et son grand frère, plus costaud, le L298.
Le L293(D)
Tout d’abord, voici un lien vers la datasheet du composant . Les premières données nous apprennent que ce composant est un "quadruple demi-pont en H". Autrement formulé, c’est un double pont en H (car oui, 4 fois un demi ça fait 2 !). Ce composant est fait pour fonctionner avec des tensions de 4.5V à 36V et sera capable de délivrer 600 mA par canaux (dans notre cas cela fera 1,2A par moteur puisque nous utiliserons les demi-ponts par paire pour tourner dans les deux sens). Un courant de pic peut être toléré allant jusqu’à 1,2A par canaux (donc 2,4A dans notre cas). Enfin, ce composant existe en deux versions, le L293 et le L293D. La seule différence (non négligeable) entre les deux est que le L293D intègre déjà les diodes en parallèle des transistors. Un souci de moins à se préoccuper ! En revanche, cela implique donc des concessions sur les caractéristiques (le courant max passe à 1A par canaux et 2A pic pour la version sans les diodes). Le branchement de ce composant est assez simple (page 2 de la datasheet), mais nous allons le voir ensemble maintenant. Ce composant a 16 broches et fonctionne selon un système de symétrie assez simple.
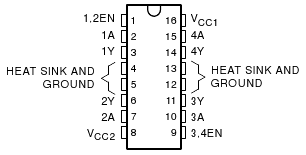
De chaque côté les broches du milieu (4, 5, 12 et 13) servent à relier la masse mais aussi à dissiper la chaleur. On trouve les entrées d’activation des ponts ( enable ) sur les broches 1 et 9. Un état HAUT sur ces broches et les ponts seront activés, les transistors pourront s’ouvrir ou se fermer, alors qu’un état BAS désactive les ponts, les transistors restent ouverts. Ensuite, on trouve les broches pour piloter les transistors. Comme un bon tableau vaut mieux qu’un long discours, voici les cas possibles et leurs actions :
| Input 1 (broche 2 et 10) | Input 2 (broche 7 et 15) | Effet |
|---|---|---|
| 0 | 1 | Tourne dans le sens horaire |
| 1 | 0 | Tourne dans le sens anti-horaire |
| 0 | 0 | Frein |
| 1 | 1 | Frein |
Ainsi, en utilisant une PWM sur la broche d’activation des ponts on sera en mesure de faire varier la vitesse. Il ne nous reste plus qu’à brancher le moteur sur les sorties respectives (2 et 7 ou 11 et 14 selon le pont utilisé) pour le voir tourner.
Et voilà ! Vous savez à peu près tout ce qu’il faut savoir (pour l’instant
) sur ce composant.
Attends attends attends, pourquoi il y a deux broches Vcc qui ont des noms différents, c’est louche ça !
Ah oui, c’est vrai et c’est important ! Le composant possède deux sources d’alimentation. Une pour la partie "logique" (contrôle correct des transistors), VCC1 ; et l’autre pour la partie puissance (utile pour alimenter les moteurs à la bonne tension), VCC2. Bien que ces deux entrées respectent les mêmes tensions (4.5V à 36V), nous ne sommes pas obligés de mettre des tensions identiques. Par exemple, la tension pour la logique pourrait venir du +5V de la carte Arduino tandis que la partie puissance pourrait être fournie par une pile 9V par exemple (n’oubliez pas de bien relier les masses entre elles pour avoir un référentiel commun).
N’utilisez JAMAIS le +5V de la carte Arduino comme alimentation de puissance (pour la logique c’est OK). Son régulateur ne peut fournir que 250mA ce qui est faible. Si vous l’utilisez pour alimenter des moteurs vous risquez de le griller !
Comme je suis sympa (
) je vous donne un exemple de branchement du composant avec un moteur et une carte Arduino (j’ai pris le modèle L293D pour ne pas m’embêter à devoir mettre les diodes de protection sur le schéma :roll: ) :
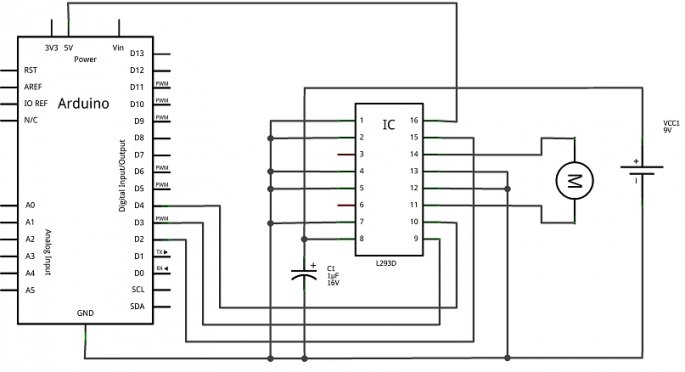
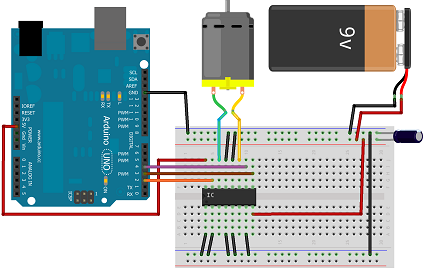
Vous noterez la présence du gros condensateur polarisé (100 µF / 25V ou plus selon l’alimentation) pour découpler l’alimentation de puissance du L293D . Comme je n’utilise qu’un seul pont, j’ai relié à la masse les entrées de celui qui est inutilisé afin de ne pas avoir des entrées qui "grésillent" et fassent consommer le montage pour rien. Enfin, vous remarquez que j’utilise trois broches de l’Arduino, deux pour le sens (2 et 4) et une PWM pour la vitesse (3).
Le L298
Étudions maintenant le grand frère du L293 : le L298 . Si je parle de grand frère ce n’est pas innocent. En effet, son fonctionnement est très similaire à celui du L293, mais il est capable de débiter des courants jusqu’à 2A nominal par pont et jusqu’à 3A pendant un bref instant. Il propose aussi une fonction pouvant être intéressante qui est la mesure du courant passant au travers du pont (pour vérifier si votre moteur est "rendu en butée" 1 par exemple). Que dire de plus ? On retrouve deux broches d’alimentation, une pour la logique et l’autre pour la puissance. Celle pour la logique peut aller de 4.5 à 7V (là encore on pourra utiliser celle de l’Arduino). L’entré puissance, en revanche, admet une tension comprise entre 5 et 46V. Pour un fonctionnement optimal, la documentation nous recommande de placer des condensateurs de 100nF sur chaque ligne d’alimentation. Et comme pour le L293, on pourra aussi placer un gros condensateur polarisé de 100µF (tension à choisir selon l’alimentation) sur la ligne d’alimentation de puissance. Comme le fonctionnement est le même que celui du L293, je vais juste vous proposer une liste des broches utiles (oui je suis fainéant !).
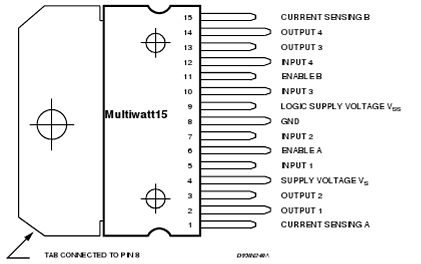
Pour le premier pont :
- Les sorties sont situées sur les broches 2 et 3.
- Les entrées pour le sens de rotation sont la 5 et 7 et la PWM ( enable ) ira sur la broche 6.
Pour le second pont :
- Les sorties sont situées sur les broches 13 et 14.
- Les entrées pour le sens de rotation sont la 10 et 12 et la PWM ( enable ) ira sur la broche 11.
Pour les deux ponts :
- La masse, qui est au milieu sur la broche 8.
- L’alimentation de la logique de commande (le 5V) sur la broche suivante, la 9.
- Et l’alimentation de la partie puissance sur la broche 4.
Je ne mentionne pas les broches 1 et 15 qui sont celles servant à mesurer le courant traversant les ponts. Je doute que vous vous en serviez dans un premier temps et si vous arrivez jusque là je n’ai aucun doute que vous arriverez à les mettre en oeuvre (indice : il faudra utiliser une résistance
)
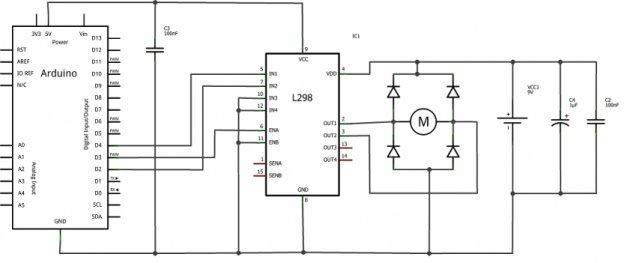
Le L298 n’existe pas avec les diodes de roue libre intégrées. Prenez donc garde à bien les rajouter dans votre montage sous peine de voir votre composant griller.
Comme précédemment, voici un schéma d’illustration (l’image représentant le L298 n’est pas exacte, mais le boitier multiwatt n’existe pas encore dans Fritzing donc j’ai dû feinter) :
Et Arduino dans tout ça ?
Bref rappel sur les PWM
Si vous avez bien lu la partie précédente, vous avez dû apprendre que pour pouvoir modifier la vitesse de rotation du moteur il faut utiliser un signal PWM. Mais vous souvenez-vous comment on s’en sert avec Arduino ? Allez, zou, petite piqûre de rappel ! Commençons par redire où sont situées les broches utilisables avec la PWM. Elles sont au nombre de 6 et ont les numéros 3, 5, 6, 9, 10 et 11. Pour les utiliser, vous devrez les configurer en sortie dans le setup() de votre programme :
const int brochePWM = 3;
void setup()
{
// configuration en sortie de la broche 3
pinMode(brochePWM, OUTPUT);
}
Ensuite, vous pourrez agir sur le
rapport cyclique
du signal PWM (le ratio entre temps à l’état HAUT et temps à l’état BAS) en utilisant la fonction
analogWrite(broche, ratio)
. L’argument
broche
désigne… la broche à utiliser et l’argument
ratio
indique la portion de temps à l’état haut du signal.
/* le signal PWM est généré sur la broche 3 de la carte Arduino
avec un rapport cyclique de 50%
(état HAUT égal en temps à celui de l'état BAS */
analogWrite(brochePWM, 127);
analogWrite
Le rapport cyclique est défini par un nombre allant de 0 à 255. Cela signifie qu’à 0, le signal de sortie sera nul et à 255, le signal de sortie sera à l’état HAUT. Toutes les valeurs comprises entre ces deux extrêmes donneront un rapport cyclique plus ou moins grand. Dans notre cas, le moteur tourne plus ou moins vite selon si le rapport cyclique est grand ou petit. Pour savoir quel rapport cyclique correspond avec quelle valeur, il faut faire une règle de trois :
| Valeur argument | Rapport cyclique (%) |
|---|---|
| 0 | 0 |
| 127 | 50 |
| 255 | 100 |
Le calcul donnant la valeur pour chaque portion est défini par cette relation :
Le résultat de ce calcul donne la valeur de l’argument pour le rapport cyclique recherché. x est la valeur du rapport cyclique que vous souhaitez donner au signal.
Utiliser un shield moteur
Comme nous l’avons vu précédemment, réaliser un pont en H demande quelques efforts (surtout si vous désirez tout faire vous mêmes
 ). Afin de rendre ces derniers plus accessibles aux personnes ayant moins de moyens techniques (tout le monde ne dispose pas du matériel pour réaliser ses propres cartes électroniques !), l’équipe Arduino a développé et mis en productions un shield (une carte d’extension) pour pouvoir utiliser facilement des moteurs. Cette extension possède ainsi tout ce qu’il faut pour mettre en œuvre rapidement un ou des moteurs. La seule contrepartie est que les broches à utiliser sont imposées. Cependant, il existe une multitude de shields moteurs
non officiels
pouvant faire les mêmes choses ou presque. L’avantage de ces derniers est indéniablement leur prix souvent moins cher. En revanche, il n’est pas toujours facile de trouver leur documentation et le format de la carte ne se soucie pas forcément du "standard" Arduino (et n’est donc pas forcément adaptable en "s’ajoutant par dessus" comme un shield officiel le ferait). Je vais donc maintenant vous présenter le shield officiel, son fonctionnement et son utilisation, puis ensuite un shield non-officiel (acheté pas cher sur le net) que je possède et avec lequel je ferai mes photos/vidéos. Vous devriez alors avoir assez de connaissances pour utiliser n’importe quel shield non-officiel que vous pourrez trouver. Les deux shields présentés ont un point commun : ils utilisent tous les deux le L298 comme composant pour les ponts en H.
). Afin de rendre ces derniers plus accessibles aux personnes ayant moins de moyens techniques (tout le monde ne dispose pas du matériel pour réaliser ses propres cartes électroniques !), l’équipe Arduino a développé et mis en productions un shield (une carte d’extension) pour pouvoir utiliser facilement des moteurs. Cette extension possède ainsi tout ce qu’il faut pour mettre en œuvre rapidement un ou des moteurs. La seule contrepartie est que les broches à utiliser sont imposées. Cependant, il existe une multitude de shields moteurs
non officiels
pouvant faire les mêmes choses ou presque. L’avantage de ces derniers est indéniablement leur prix souvent moins cher. En revanche, il n’est pas toujours facile de trouver leur documentation et le format de la carte ne se soucie pas forcément du "standard" Arduino (et n’est donc pas forcément adaptable en "s’ajoutant par dessus" comme un shield officiel le ferait). Je vais donc maintenant vous présenter le shield officiel, son fonctionnement et son utilisation, puis ensuite un shield non-officiel (acheté pas cher sur le net) que je possède et avec lequel je ferai mes photos/vidéos. Vous devriez alors avoir assez de connaissances pour utiliser n’importe quel shield non-officiel que vous pourrez trouver. Les deux shields présentés ont un point commun : ils utilisent tous les deux le L298 comme composant pour les ponts en H.
Le shield officiel d’Arduino
Tout d’abord, voici l’adresse de description de ce shield :
le shield moteur
. Comme vous avez bien lu la partie précédente à propos du L298, vous connaissez déjà la majeure partie des choses à savoir. Parmi elles, vous savez que le L298 nécessite trois broches de "pilotage" (par pont intégré) et envoie la puissance sur deux broches (par moteur). Éventuellement nous disposons aussi des deux "sondes de courant" mais nous y reviendrons plus tard. Voici un petit synoptique de résumé que je vous ai concocté pour l’occasion :
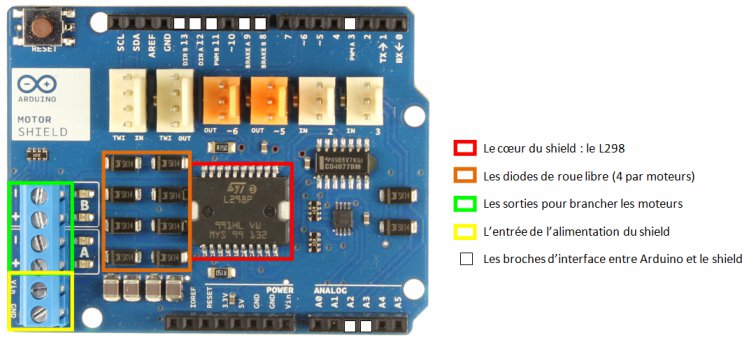
Voici comment il fonctionne et les quelques précautions d’utilisation.
- L’alimentation de puissance sur les borniers à visser à gauche est reliée à l’Arduino et peut donc lui servir de source d’alimentation. Si vous voulez dédier cette alimentation à la carte moteur, il faut donner un coup de cutter sur le strap marqué Vin en dessous de la carte
- Les entrées/sorties du shield sont reliées à l’Arduino de la manière suivante :
| Fonction | Broches mot. A | Broches mot. B |
|---|---|---|
| Direction | 12 | 13 |
| PWM | 3 | 11 |
| Frein | 9 | 8 |
| Mesure de courant | A0 | A1 |
La mesure de courant se fait sur les broches A0 et A1. Si vous avez besoin de ces broches pour d’autre applications, vous pouvez là encore désactiver la fonction en coupant le strap en dessous de la carte. Sinon, la mesure se fera simplement avec la fonction porte logique OU Exclusif, on peut déactiver la fonction de "frein" tout en gardant celle du sens. Grâce à cela, on peut se limiter à seulement deux broches pour commander chaque moteur : celle du sens et celle de la vitesse. Voici comment ils ont fait : Tout d’abord, regardons la table de vérité du OU EXCLUSIF. Cette dernière s’interprète comme suit : "La sortie est à 1 si une des deux entrées uniquement est à 1". Sous forme de tableau on obtient ça:
| Entrée A | Entrée B | Sortie |
|---|---|---|
| 0 | 0 | 0 |
| 1 | 0 | 1 |
| 0 | 1 | 1 |
| 1 | 1 | 0 |
Maintenant rappelez-vous, les conditions de freinage étaient justement représentées lorsque les deux entrées du pont étaient au même niveau. En couplant intelligemment le résultat de cette porte logique et les entrées de pilotage, on peut décider oui ou non d’avoir la fonction de frein. Afin de mieux comprendre, je vous invite à consulter cet extrait du schéma technique du shield :
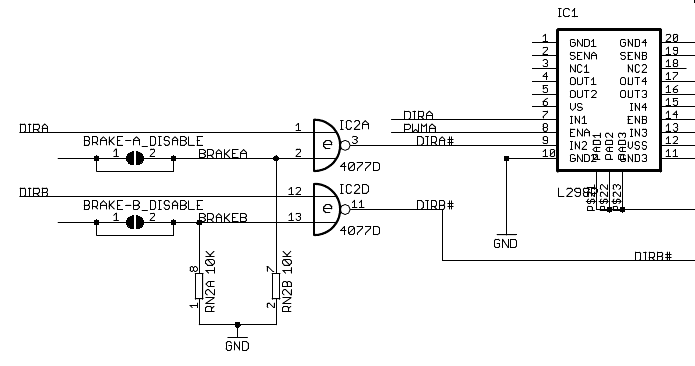
Grâce à ce montage, vous pouvez choisir ou non d’avoir un mode de frein sur vos moteurs. Si vous préférez avoir deux broches disponibles et ne pas avoir de frein (juste une roue libre lorsque la PWM est à 0), alors il vous suffira une fois de plus de couper les straps en dessous de la carte.
N’ayez pas peur d’avoir des regrets ! Si vous coupez un strap, vous pourrez toujours le remettre en ajoutant un petit point de soudure pour relier les deux pastilles prévues à cet effet.
Le mieux aurait été d’avoir la possibilité de mettre des cavaliers que l’on enlève à la main, mais bon, c’est comme ça.
Vous savez maintenant tout à propos de ce shield. Je vais maintenant vous en présenter un non-officiel et ensuite nous passerons à un petit montage/code d’exemple pour finir ce chapitre.
Mon shield non-officiel
Maintenant que vous connaissez le fonctionnement global du shield officiel, vous allez pouvoir utiliser sans problème la plupart des shields moteurs. Afin de ne pas faire de publicité pour un site ou un autre, je vais vous présenter mon shield qui vaut aussi bien qu’un autre (mais pas forcément mieux). Il n’y a aucun parti pris, j’ai acheté ce dernier afin de profiter de tarif intéressant lors d’une commande avec d’autres composants. Si j’avais été uniquement à la recherche d’un shield moteur, j’en aurais peut-être pris un autre qui sait ! Bref, assez de ma vie, passons à l’étude du module ! Afin de bien commencer les choses, je vais d’abord vous montrer une photo d’identité de ce dernier. Ensuite je vous expliquerai où sont les broches qui nous intéressent et ferai un parallèle avec le shield officiel. Les deux étant basés sur un L298 l’explication sera assez rapide car je n’ai pas envie de me répéter. Je ferai néanmoins un petit aparté sur les différences (avantages et inconvénients) entre les deux.
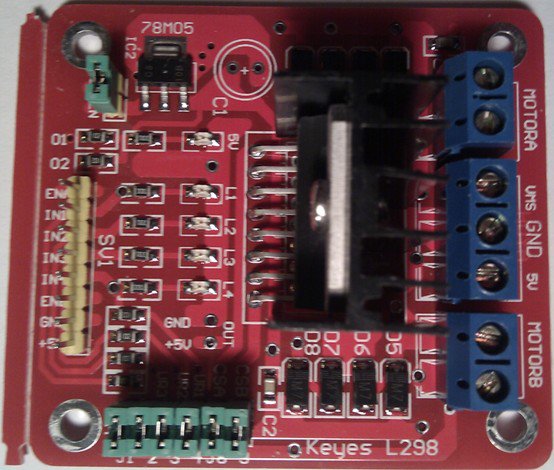
Voici une petite liste des points importants :
- À gauche en jaune : les entrées de commande. EnA , In1 , In2 pour le moteur A ; EnB , In3 , In4 pour le moteur B. On trouve aussi une broche de masse et une sortie 5V sur laquelle je reviendrai.
-
En bas en
vert
différents
jumpers
(des cavaliers si vous préférez
) pour activer des résistances de pull-down (force une entrée/sortie à l’état bas) et câbler la mesure de courant de sortie des ponts
- À droite en bleu , les bornes pour brancher les moteurs A et B (respectivement en haut et en bas) et au milieu le bornier pour amener l’alimentation de puissance (et une entrée ou sortie) de 5V
Au milieu on retrouve le L298 avec de chaque côté (en haut et en bas) les diodes de roue libre pour chaque moteur. Une petite précision s’impose par rapport à ce shield. La carte embarque un régulateur 5V (le petit bloc noir en haut à gauche marqué 78M05). Ce dernier peut être utilisé ou non (Activez-le avec le jumper vert juste à coté). Si vous le laissez activé, c’est lui qui fournira l’alimentation pour la logique du L298. Si vous le désactivez, vous devrez fournir vous-même le 5V pour la logique. Dans tous les cas, il vous faut relier les masses puissances et logiques entre Arduino et le shield afin d’avoir un référentiel commun. Si vous l’activez, alors vous obtiendrez une sortie de 5V sur le bornier bleu à droite (utile pour alimenter l’Arduino par exemple). Si vous le désactivez, alors vous devrez fournir le 5V (et donc le bornier bleu devra être utilisé comme une entrée). Ce shield n’est en fait qu’une simple carte électronique disposant du L298 et facilitant l’accès à ses broches. Le fonctionnement se fait exactement comme nous l’avons vu dans le chapitre précédent, lorsque je vous présentais le L293 et L298 pour la première fois. Pas de facétie avec des portes logiques pour gagner des broches. Ici, tout est brut de décoffrage, on commande directement le pont en H. Il vous faudra donc trois broches par moteur, deux pour gérer la direction et le frein et une (PWM) pour la vitesse.
Petit programme de test
Nous allons maintenant pouvoir passer aux choses sérieuses : l’utilisation du moteur avec l’Arduino !
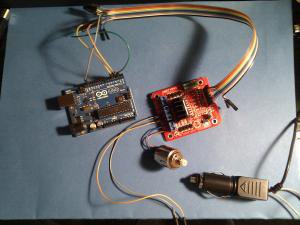
L’électronique
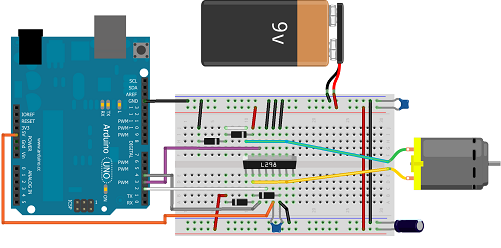
Pour cela, nous allons commencer par câbler le shield. En ayant la partie précédente concernant le vôtre sous les yeux, vous devriez pouvoir vous en sortir sans trop de difficulté. (Désolé, pas de schéma ce coup-ci car le logiciel que j’utilise ne possède pas encore le shield moteur dans sa base de données, faites donc preuve d’imagination.
) Personnellement, je n’utiliserai qu’un seul moteur (car dans l’immédiat j’en ai qu’un sous la main
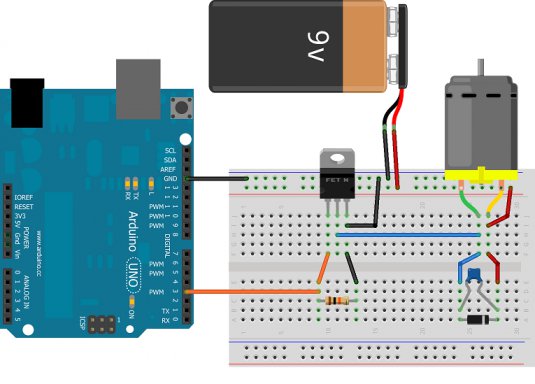
). Je vais donc le brancher sur les bornes bleues "Moteur A". Ensuite, je vais relier les différentes broches de commande à mon Arduino. La broche EnA sera reliée à une sortie de PWM (dans mon cas la broche 3) et les broches In1 et In2 seront reliées à n’importe quelles broches numériques (2 et 4 pour moi). Il ne nous reste plus qu’à nous occuper de l’alimentation. Tout d’abord, je mets un fil entre la masse du shield et celle de l’Arduino (pour avoir un référentiel commun). Comme ma carte possède son propre régulateur de tension 5V, pas besoin de l’amener depuis Arduino. Enfin, je relie les deux fils pour la puissance. Dans mon cas ce sera une alimentation 12V (400 mA max, wouhou) qui vient d’un adaptateur allume-cigare (censé fournir du 5V) que j’ai démonté pour obtenir une source de 12V. Je vous propose aussi de rajouter un potentiomètre sur une entrée analogique. De cette façon nous allons pouvoir faire varier la vitesse sans recharger le programme
. Et voilà, point de vue électronique tout est prêt. Voilà ce que ça donne chez moi (un beau bazar
, mais j’ai oublié le potentiomètre) :
L’informatique
Maintenant, nous allons devoir nous occuper du code et comme toujours, nous commençons par lister les variables concernant les broches utilisées :
// la PWM pour la vitesse
const int enable = 3;
// les broches de signal pour le sens de rotation
const int in1 = 2;
const int in2 = 4;
// une entrée analogique (A0) pour régler la vitesse manuellement
const int potar = 0;
Ces différentes broches seront bien entendu des broches de sortie (sauf l’analogique), donc nous les déclarons comme telles dans le
setup()
:
void setup()
{
pinMode(enable, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
// j'utilise la liaison série pour verifier
// la vitesse définie par le potentiomètre
Serial.begin(115200);
// on démarre moteur en avant et en roue libre
analogWrite(enable, 0);
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
}
Et voila, si vous exécutez le code maintenant votre moteur sera… arrêté ! Eh oui, j’ai volontairement mis une vitesse nulle à la fin du setup() pour éviter que le moteur ne s’emballe au démarrage du programme. Mais si vous changez cette dernière (mettez 50 pour voir) vous verrez votre moteur se mettre à tourner. Nous allons donc rajouter un peu d’interactivité, pour que vous puissiez vous-même augmenter/diminuer la vitesse en fonction de la valeur lue sur le potentiomètre :
void loop()
{
// on lit la valeur du potentiomètre
int vitesse = analogRead(potar);
// division de la valeur lue par 4
vitesse /= 4;
// envoie la nouvelle vitesse sur le moteur
analogWrite(enable, vitesse);
// on affiche la vitesse sur le moniteur série
Serial.println(vitesse);
delay(50);
}
Mais pourquoi tu divises la vitesse par 4 à la ligne 5 ? Je veux aller à fond moi !
C’est très simple. La lecture analogique nous renvoie une valeur entre 0 et 1023 (soit 1024 valeur possibles). Or la fonction analogWrite ne peut aller qu’entre 0 et 255 (total de 256 valeurs). Je divise donc par 4 pour rester dans le bon intervalle ! Car : .
Programme plus élaboré
Maintenant, je vous fais cadeau d’un code vous permettant d’aller dans les deux sens et à vitesse variable. Mais, je vous conseille d’essayer de le faire par vous-même avant de regarder ce qu’il y a dans la balise secret. Le potentiomètre est utilisé comme régulateur de vitesse, mais on va virtuellement décaler l’origine. Autrement dit, entre 0 et 511 nous irons dans un sens, et entre 512 et 1023 nous irons dans l’autre sens. Nous ferons aussi en sorte que la vitesse soit de plus en plus élevée lorsque l’on "s’éloigne" du 0 virtuel (de la valeur 512 donc). Je vous donne le code tel quel (avec des commentaires bien sûr). Libre à vous de le traiter comme un exercice. À sa suite, une petite vidéo du résultat.
const int enable = 3; // la PWM
const int in1 = 2; // les broches de signal
const int in2 = 4;
const int potar = 0; // la broche pour régler la vitesse
void setup()
{
pinMode(enable, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
Serial.begin(115200);
// on démarre moteur en avant et en roue libre
analogWrite(enable, 0);
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
}
void loop()
{
int vitesse = analogRead(potar);
// dans le sens positif
if(vitesse > 512)
{
// on décale l'origine de 512
vitesse -= 512;
// le moteur va dans un sens
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
Serial.print("+");
}
else // dans l'autre sens
{
// de même on décale pour que la vitesse augmente en s'éloignant de 512
vitesse = 512-vitesse;
// le moteur va dans l'autre sens
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
Serial.print("-");
}
// pour rester dans l'intervalle [0;255] (sinon on est dans [0;512])
vitesse /= 2;
// envoie la vitesse
analogWrite(enable, vitesse);
// et l'affiche
Serial.println(vitesse);
delay(50);
}
Bravo à ceux qui ont essayé de faire ce programme, même s’ils n’y sont pas arrivé ! Dans ce dernier cas, vous pouvez aller voir sur les forums et poser vos éventuelles questions après avoir vérifié que vous avez bien tout essayé de comprendre.
Voilà la vidéo qui montre le fonctionnement du programme :
Désolé pour la qualité de la vidéo, il faut vraiment que je change d’appareil…
Vous savez désormais comment fonctionne un moteur à courant continu et quels sont les moyens de le piloter. Il va dorénavant être possible de vous montrer l’existence de moteurs un peu particuliers qui se basent sur le moteur à courant continu pour fonctionner. Et vous allez voir que l’on va pouvoir faire plein de choses avec !
-
s’il rencontre un obstacle qui freine sa course
↩

{kind=link}